Wi-Fi HaLow™ で車両を遠隔操作してみた
2024年12月25日 水曜日

CONTENTS
はじめに
以前に、IEEE 802.11ah(Wi-Fi HaLow™)の実用性や性能などの調査の目的で荒川の河川敷で評価を実施しました。詳しくは過去のブログをご覧ください。
また、芦ノ湖での実証実験も行いました。
おさらい
おさらいを兼ねて、IEEE 802.11ah(Wi-Fi HaLow™)の特徴を以下に挙げます。
・通常の(2.4/5/6GHz帯を使用する)Wi-Fiより通信距離が長い(最大1km程度)
・通常のWi-Fiと比べて通信速度は速くない(実測で数百K~2Mbps程度)
・通常のWi-Fiと同様にTCP/IP通信が可能である
・現時点では通称「Duty 10%ルール」(全体のうち10%の時間しか電波を発してはいけない、という制限)が適用される
実際にWi-Fi HaLow™の実用化は進んできておりますが、現時点では遠隔地に監視カメラを設置するような使われ方が多いように感じます。
監視カメラ以外の用途でWi-Fi HaLow™を使えないものでしょうか。
例えば、ドローンの操縦では半径約1kmに及ぶWi-Fi HaLow™の通信距離は非常に役に立つと思いますし、同様に遠隔での業務用特殊車両(フォークリフトやトラクターなど)の操縦にも使えそうです。
ということで、今回はデモ用としてWi-Fi HaLow™を使用して遠隔で操縦できるラジコンを作ってみましたので、紹介します。
できあがったもの
さっそくですが、実際の完成品がこちらです。

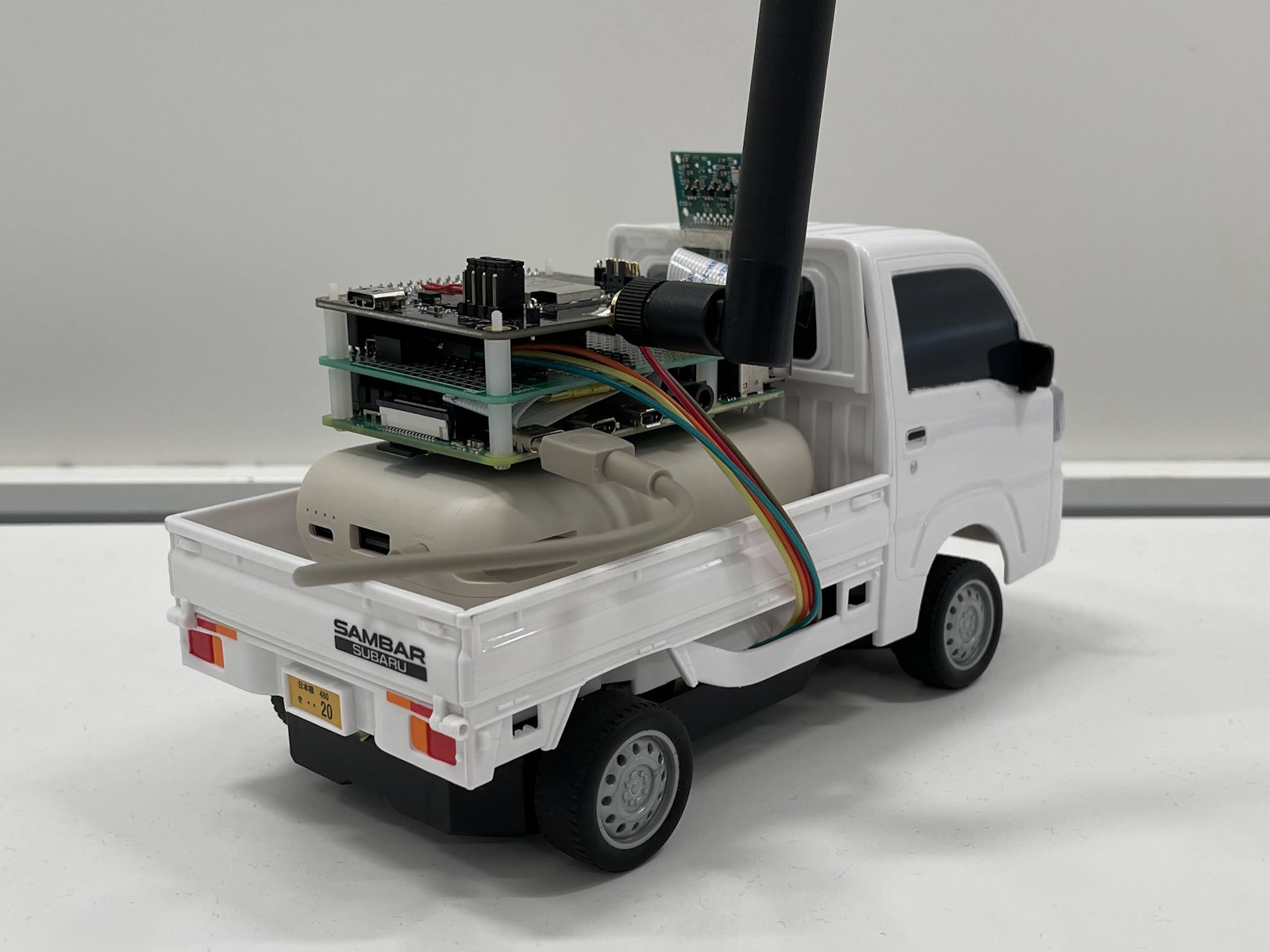
車両側(Wi-Fi HaLow™子機)
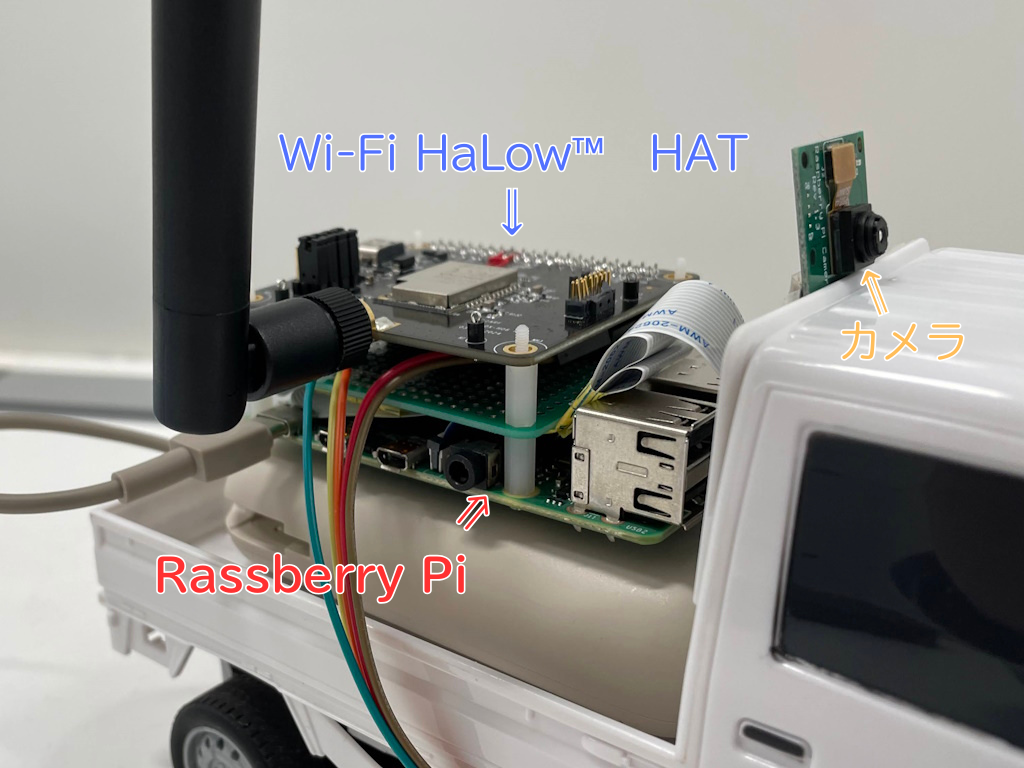
京商の軽トラックのラジコンを、Raspberry PiのGPIOから制御できるように改造しました。
軽トラの荷台にRaspberry PiとAsiaRF社製 Wi-Fi HaLow HATを設置し、これをWi-Fi HaLow™子機として動作させています。
Raspberry Pi上で、TCPパケットを受信するとGPIOを制御(=ラジコンを操縦)するサーバアプリを動作させています。
Raspberry Piにはカメラモジュールも接続してあり、リアルタイムの映像を外部にストリーミング配信します。
注意
ラジコンの改造はメーカの想定外の使い方であり、改造を勧めるものではありません。
今回は自己責任で改造しています。
操縦側(Wi-Fi HaLow™親機)

Wi-Fi HaLow™の親機としてCenturySystems MA-S120/LH(写真の青い筐体のもの)を使用します。この親機とRaspberry Pi(写真の黒い筐体のもの)を有線LANで接続します。
操縦用としてBluetoothコントローラ(写真の黄色いもの)を使用します。
Raspberry Piとコントローラはあらかじめペアリングしておきます。
コントローラの操作をすると、クライアント(この黒い筐体のRaspberry Pi)からサーバ(ラジコン上のRaspberry Pi)に向けてラジコン操縦用のTCPパケットを送信するクライアントアプリを動作させています。

また、Raspberry Pi にディスプレイを接続し、車両のカメラの映像ストリーミングを受信して表示しています。
全体構成
構成を1枚の絵にすると以下のとおりです。
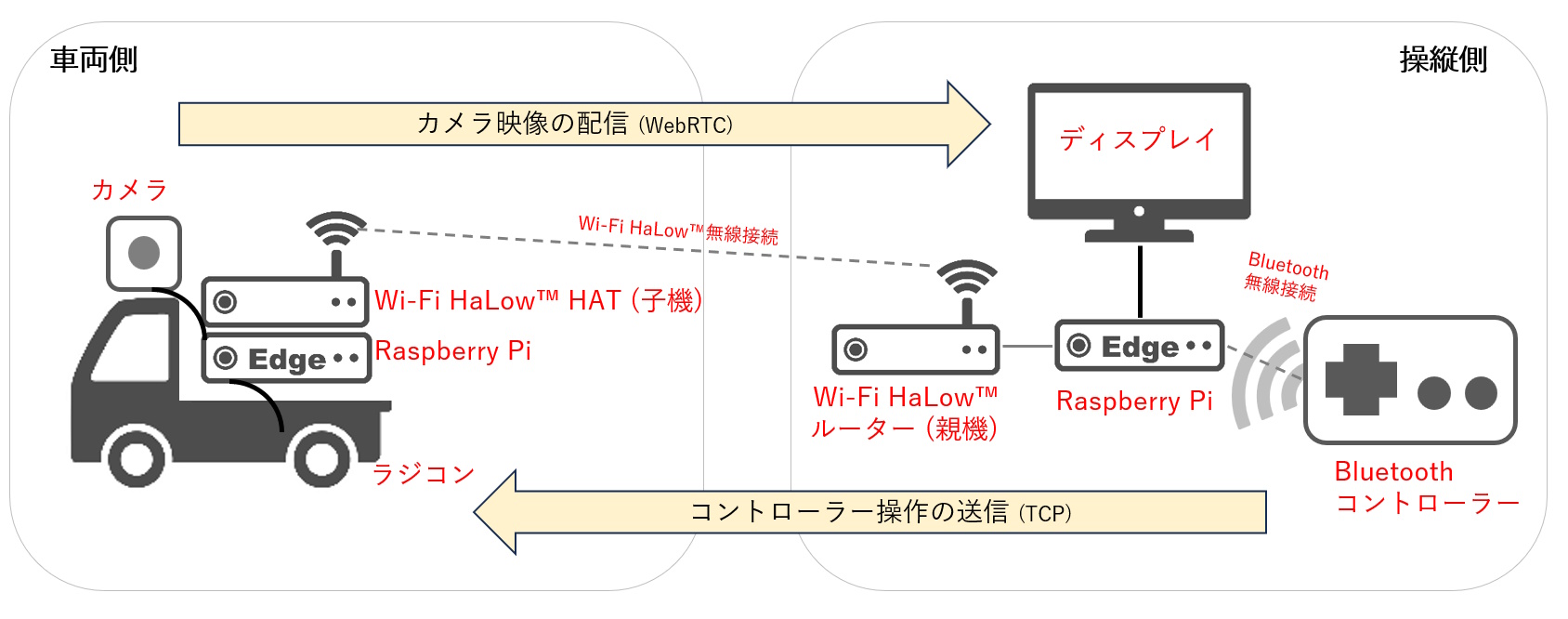
構成は特に難しいものではなく、車両側と操縦側をWi-Fi HaLow™で接続し、その間をTCP/IPで通信するだけのものです。
特殊な通信を行う他のLPWAの規格(LoRaWANやWi-SUNなど)と違い、一般的なTCP/IP通信が行えることがWi-Fi HaLow™の特徴の1つであり、既存のIP通信のノウハウがそのまま使えるところがメリットになります。
実際に動かす
実際に動かしてみました。
車両側のカメラ映像はWi-Fi HaLow™経由で送られ、(最大1km程度先の)操縦側でほぼリアルタイムで参照できます。それを見ながらコントローラを操作します。
操縦側でのコントローラの操作は、Wi-Fi HaLow™経由で(最大1km程度先の)車両側に送られ、車両が実際に走り回ることになります。
見ての通り、車両側のカメラから送られてくる映像はだいぶ荒いですし、カクカク感も強いです。
これはWi-Fi HaLow™の通信速度が通常のWi-Fiよりかなり遅いため、意図的に画質を落としているためです。
電波状況によっては100~200Kbps程度まで速度が落ちることもありますので、それを踏まえて今回はVGA解像度・フレームレート5fps程度の映像品質に設定しています。
対して、Wi-Fi HaLow™の通信距離のメリットは享受することができています。
今回は屋内でしか動かしていないので1km程度の距離での検証はできておりませんが、オフィス内の端から端(通常のWi-Fiでは届かない距離)での操縦は特に問題なく動作させることができました。
ごく普通のオフィス内ですので机・パーティション・人間などの障害物はたくさんありますが、Wi-Fi HaLow™の920MHz帯の電波は障害物を回り込みやすい特性がありますので、問題なく通信できたのだと思います。(とは言え、障害物は電波に悪い影響を与えることは間違いないですし、今回はアンテナの設置位置も良いとは言い難いですので、通信距離は理想値よりだいぶ短くなります。)
このように、Wi-Fi HaLow™は遠距離通信ができるメリットはあるものの決して万能なものではありませんので、通信手段は適材適所で検討していきたいですね。
まとめ
今回は、監視カメラ以外でのWi-Fi HaLow™のユースケースを探る、というコンセプトで、Wi-Fi HaLow™を使った車両の遠隔操作を検証してみました。
Wi-Fi HaLow™を使うことで、かなり広いエリアで車両を遠隔操作できそうなことは確認できました。
今回は半分お遊びのようなものでしたが、実際のところWi-Fi HaLow™を使用したドローンや業務用機器の遠隔操作の実証実験はすでに始まっています。
引き続き、弊社はWi-Fi HaLow™の実用に力を入れております。
ご興味がある方は、ぜひ弊社までご連絡ください。